












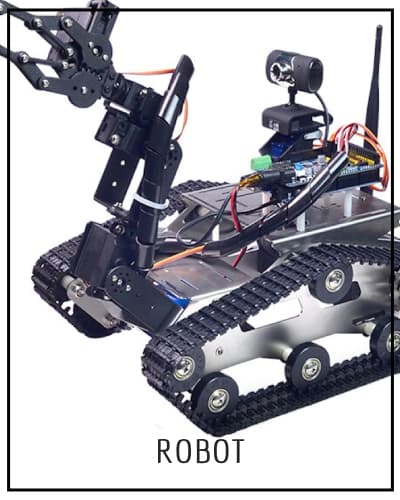











Hercules Project - ROS導航機械臂坦克




ROS導航機械臂坦克搭載1080P相機、光學雷達(LIDAR)以及四軸機械臂,並使用ROS框架整合開發。透過7吋OLED觸控螢幕操作人機介面可快速展示地圖建模、自動導航等操作。
使用者可透過即時影像遙控機器人並使用光學雷達構建地圖,結合機械臂完成自動導航夾取/搬運等任務。本產品提供開源程式碼,是個非常適合進階開發者的機器人平台。
Software Download: |
Hercules Project - ROS導航機械臂坦克
|
產品特點 - Crawler Drive |
Datasheet
|
樣品價格 NT$29,184
- 交期預估: Preorder
- 產品型號: ROS-LIDAR-Navigation-Robotic-Arm-Tank