















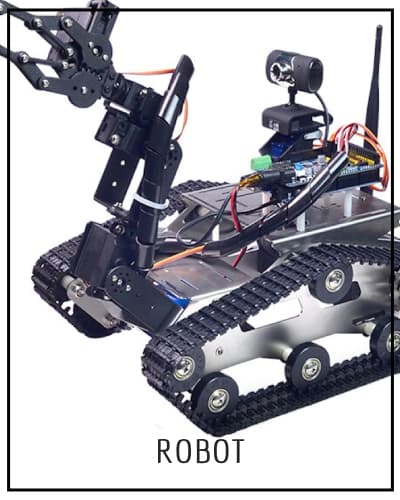













Explorer Project - ROS LIDAR Navigation Robot Tank




ROS導航機器坦克搭載720P相機與光學雷達(LIDAR)並使用ROS框架,使用者可透過WiFi即時影像遙控機器人並使用光學雷達構建地圖。方便直觀的人機交互操作介面可實現一鍵構建地圖、導航操作等功能。
機器坦克搭配相機與光學雷達可進行建模、導航、跟蹤、避障等多種功能開發,是個非常適合進階開發者的機器人平台。
軟體下載: |
Explorer Project - ROS LIDAR Navigation Robot Tank
|
產品特點 - Crawler Drive |
Datasheet
|
樣品價格 NT$11,505
- 交期預估: 可供貨, 7~21 Days
- 產品型號: ROS-LIDAR-Navigation-Robot-Tank